Les capteurs électroniques sont largement utilisés dans le domaine de la robotique et dans la nouvelle tendance de l’Internet des objets pour détecter les températures, l’humidité ou les sons, entre autres éléments pouvant fournir des informations sur l’environnement.
L’un des plus ingénieux est le capteur à ultrasons HC-SRO4, composé d’un haut-parleur et d’un microphone. Ce capteur transmet une onde ultrasonore du haut-parleur qui rebondit sur les objets environnants et est capturée par le microphone, qui est utilisé pour mesurer la distance entre eux et éviter les collisions.
Ensuite, nous verrons comment construire un circuit pour mesurer des distances avec un capteur à ultrasons et un Raspberry Pi 4. Nous vous fournirons également le code correspondant.
Matériel nécessaire:
- 1 capteur à ultrasons HC-SR04
- 1 planche à pain ou breadboard
- 1 résistance 1kΩ
- 1 résistance 2 kΩ
Câblage du circuit :
Le capteur à ultrasons HC-SR04 possède 4 broches : Vcc, utilisée pour alimenter l’appareil ; Trig, active l’envoi d’une impulsion sonore ; Echo, envoie une impulsion au Raspberry lorsqu’il capte le rebond d’une impulsion sonore ; et Gnd.
Nous allons connecter chacune de ces broches avec celles du Raspberry à l’aide de la planche à pain et des câbles femelle/mâle, mâle/mâle.
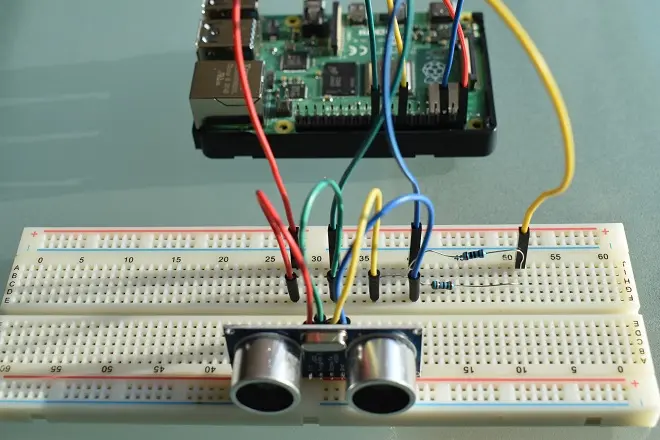
Pour commencer, placez le capteur à ultrasons sur la planche à pain (voir image). Connectez ensuite la broche Vcc à la broche 5 v du Raspberry. Ensuite, connectez la broche Trig à l’une des broches GPIO (par exemple GPIO 25). Et la broche Gnd à la broche GND.
La broche Echo doit également être connectée à l’une des broches GPIO, pas directement, mais via un diviseur de tension. En effet, le capteur fonctionne à 5 volts tandis que les broches Raspberry fonctionnent à 3,3 v.
Comment construire un diviseur de tension ?
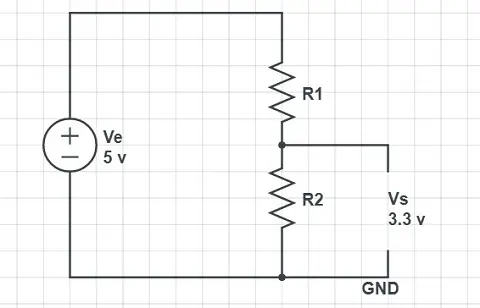
Un diviseur de tension est un circuit électrique dont le but est d’obtenir une tension de sortie inférieure à l’entrée. Sa construction est très simple et ne nécessite que l’utilisation de résistances.
La valeur des résistances est obtenue en appliquant la loi d’Ohm aux deux résistances et en tenant compte du fait que l’intensité du courant est la même dans le circuit.
D’après la loi de Kirchhoff :
Ve = V1 + Vs ===> V1= Ve – Vs
Aussi : I1= I2 ===> (Ve – Vs)/Vs = R1/R2
Dans notre cas : tension d’entrée (broche Echo) = 5 v ; tension de sortie (Vs) = 3.3 v (broche GPIO)
Après avoir effectué les substitutions respectives, on obtien :
R1/R2 = 0,51
Par conséquent, nous pouvons utiliser deux résistances quelconques tant qu’elles conservent ce rapport. Par exemple, une de 1000 Ω et une autre de 2000 Ω.
Comment connecter la broche Echo à la broche GPIO à l’aide d’un diviseur de tension?
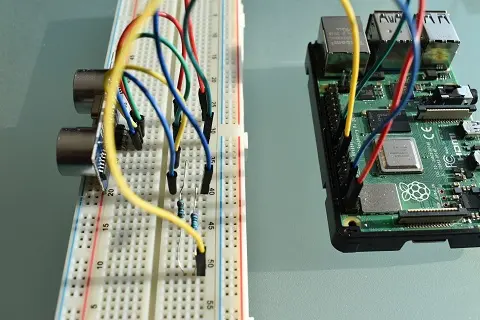
Connectez une extrémité de la résistance 1 kΩ à la broche Echo et l’autre extrémité à une résistance 2 kΩ. Connectez l’autre extrémité de la résistance 2k Ω au GND du Raspberry Pi.
Code Python pour mesurer des distances avec un capteur à ultrasons et Raspberry Pi
from gpiozero import DistanceSensor
from time import sleep
sensor=DistanceSensor(23,25)
while True:
print('La distance à l'objet est : ', sensor.distance*100, 'cm')
sleep(1)Pour exécuter le code, cliquez sur le menu Raspberry et sélectionnez > Programmation > mu. Puis copiez et collez le code. Cliquez sur Save et enregistrez le fichier avec une extension .py. Enfin, cliquez sur Run.
Voir également :