Le capteur suiveur de ligne (KY-033) est un composant largement utilisé dans les projets de robots autonomes conçus pour le suivi de ligne. Ce capteur polyvalent s’intègre parfaitement aux cartes de développement populaires telles que Arduino et Raspberry Pi, permettant aux passionnés de robotique et d’automatisation de créer facilement des systèmes de suivi de ligne précis et efficaces.
La connexion du capteur au microcontrôleur se fait à l’aide de broches ou de câbles. Par la suite, il est programmé pour interpréter ses signaux et contrôler le mouvement du robot en fonction des relevés des capteurs. Grâce à sa capacité à détecter les variations de réflexion de la lumière infrarouge, le KY-033 devient une ressource essentielle pour diriger le mouvement du robot par rapport aux lignes tracées au sol, étant particulièrement précieux dans les projets de robotique et de compétitions éducatives.
Comment fonctionne un capteur suiveur de ligne infrarouge
Le capteur KY-033 est composé d’un émetteur de lumière infrarouge (LED infrarouge) et d’un récepteur de lumière infrarouge (phototransistor). Lorsque le capteur est placé sur une ligne noire, la surface absorbe davantage de lumière infrarouge, réduisant ainsi la quantité de lumière réfléchie atteignant le phototransistor.
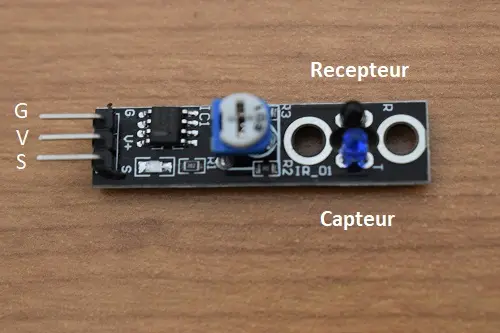
En revanche, lorsqu’il est placé sur une surface blanche, qui réfléchit davantage la lumière infrarouge, le phototransistor reçoit une plus grande quantité de lumière réfléchie. Ces différences d’intensité de la lumière infrarouge permettent de déterminer la position du capteur par rapport à la ligne, permettant ainsi un contrôle précis du mouvement du robot afin qu’il suive efficacement la ligne.
Spécifications techniques du capteur IR KY-033
Concernant ses spécifications techniques, le KY-033 fonctionne avec une tension de 3,3 à 5 volts en courant continu (V/DC) et consomme entre 18 et 30 mA de courant. Ce capteur est capable de détecter des objets à des distances allant de 1 millimètre à 2,5 centimètres. De plus, il présente des dimensions compactes avec une largeur de 11 mm et une longueur de 42 mm, et son circuit imprimé (PCB) a une épaisseur de 1,5 mm.
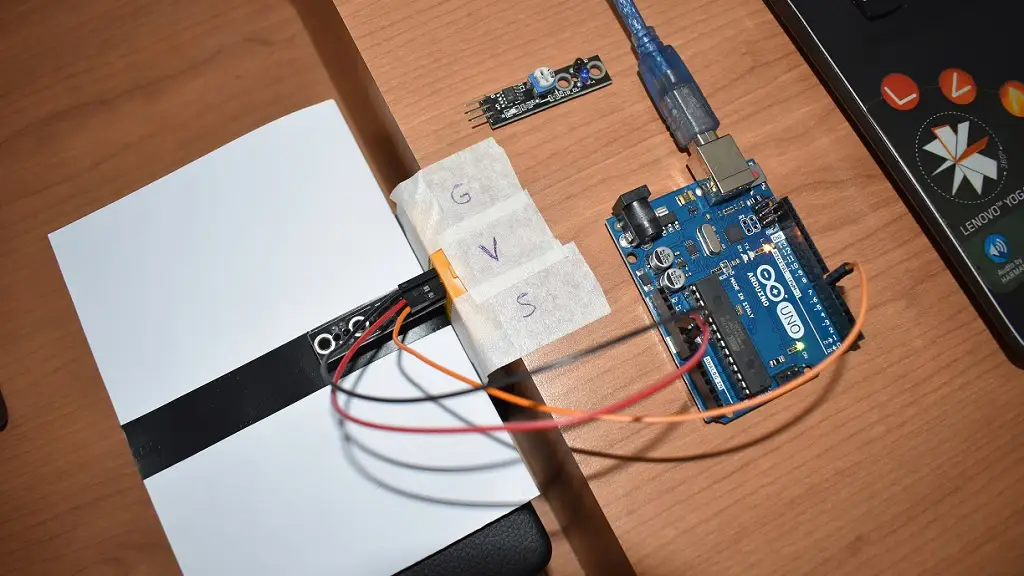
Comment connecter le capteur IR KY-033 à un Arduino
La connexion du capteur KY-033 à un Arduino s’effectue via trois bornes : G (masse), V (tension) et S (Signal). La borne G se connecte à la broche GND (terre) de l’Arduino, la borne V à la broche 5 V (tension) de l’Arduino et la borne S se connecte à l’une des broches numériques de l’Arduino, comme la broche 9. Cette configuration garantit connexion électrique appropriée afin que l’Arduino puisse recevoir et traiter efficacement les signaux du capteur infrarouge KY-033.
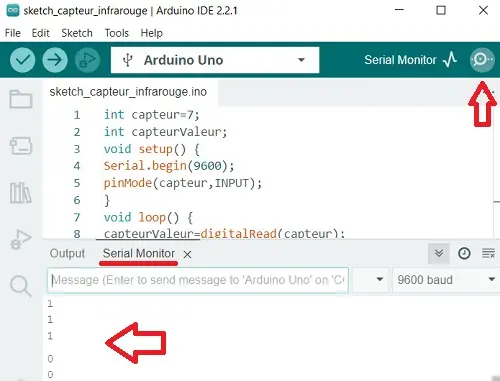
Code pour tester le capteur avec un Arduino
int capteur=7;
int capteurValeur;
void setup() {
Serial.begin(9600);
pinMode(capteur,INPUT);
}
void loop() {
capteurValeur=digitalRead(capteur);
Serial.println(capteurValeur);
delay(200);
}